Heuristics: Hand Orthosis with flexible mechanism for Brachial Plexus paralysis.

I designed this hand orthosis as my bachelor’s dissertation for a real medical case. Brachial plexus paralysis patients have no control over muscles and no sensation on the injured hand (not pain nor other). External mechanical devices, called orthosis, are secured to the injured hand, aiming to improve the orthopedic position of the hand and regain use of the limb.
My hand orthosis proposal provides a good mechanical support and grip thru a glove with metal rod guides and made of neoprene fabric, to place the patient's hand in a correct orthopedic position and to withstand all mechanical solicitations of the clamping mechanism, preventing muscular tearing, joint degradation and skin injuries.
Key specs of the orthesis :
Structural support
Polycentric rotation
Customizable to fit any hand shape and size
Slim mechanism
Low-weight (26gr. mechanism and 96gr. complete orthosis)
Low-cost ($20 USD)
Flexible mechanism
Approach:
User-Centered Design
Compliant Mechanism
Biomechanics
Prototyping
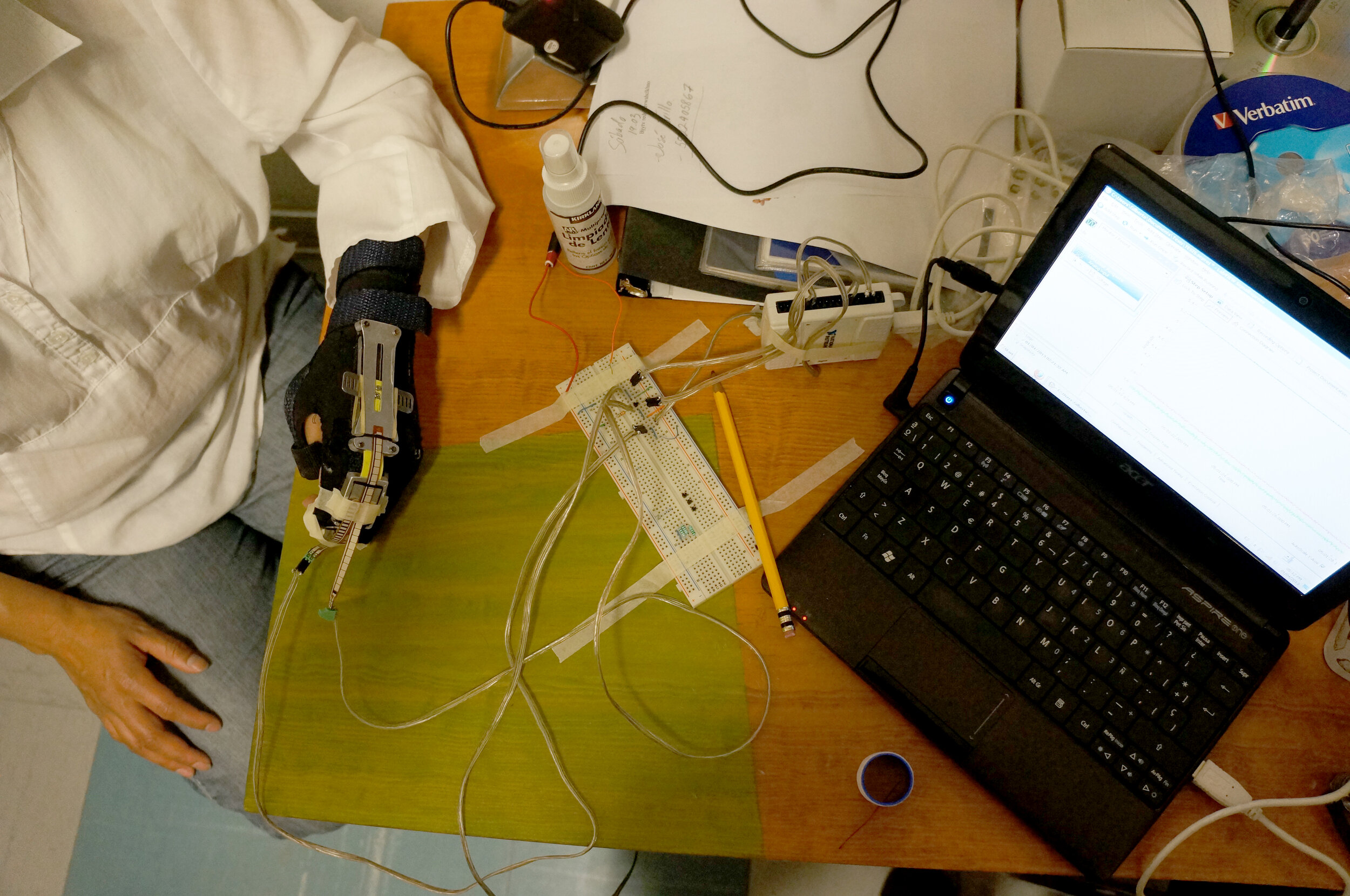
sensor-based human data acquisition
Heuristics
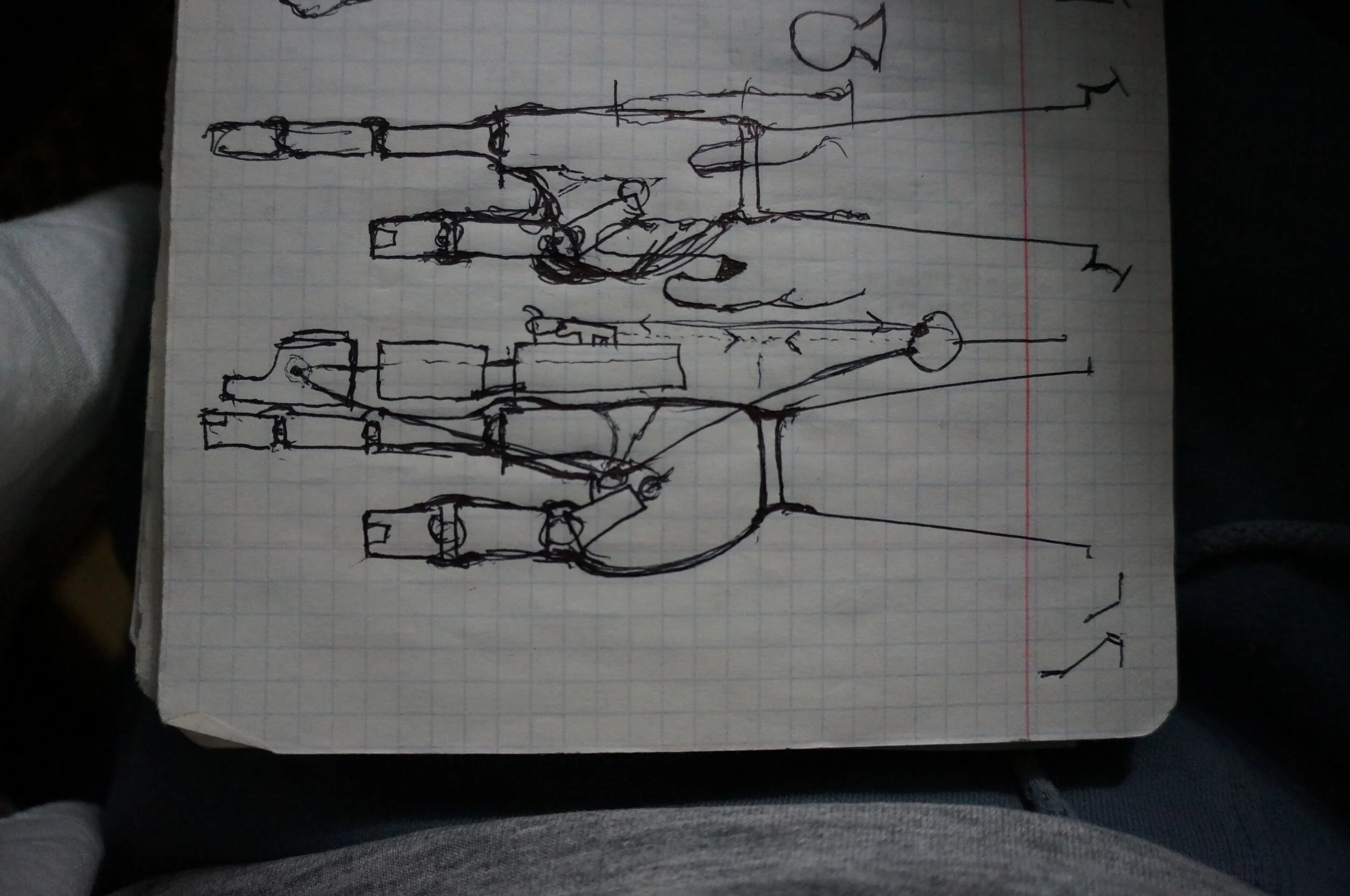
Part of my bachelor’s dissertation was an introspective analysis of my personal design process while working with a real patient and been subjected to limited economic and equipment resources. I described how new ideas emerge from unlikely inspirations (for example “when having an egg taco for breakfast”), and briefly discussed why is it rarely reported.
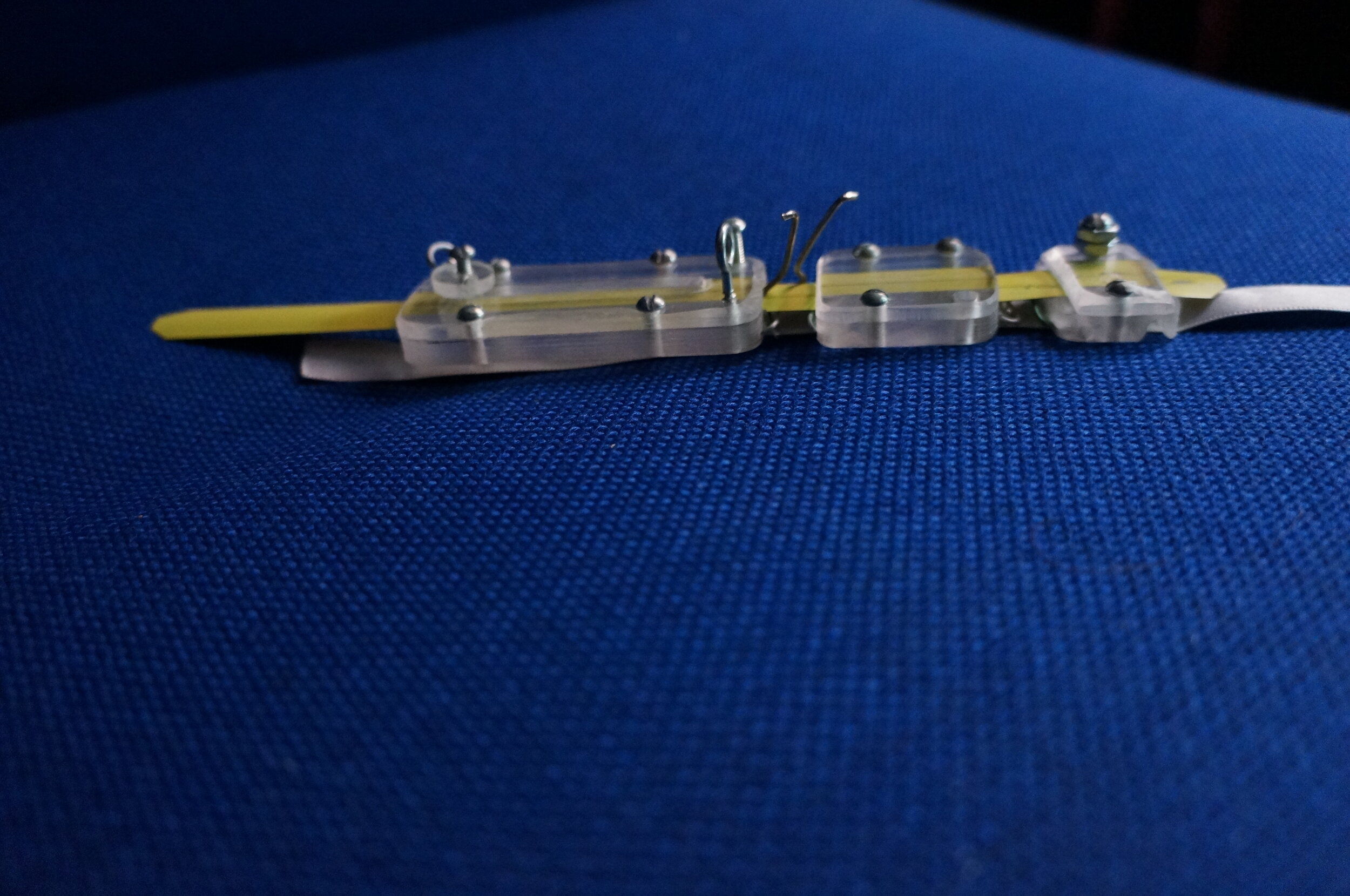
First Prototype: proof of concept.
I thought that compliant mechanisms could be a good option to make a lean mechanism capable of mimicking the polycentric rotation of the natural movement of human fingers. But compliant mechanism can’t change its dimensions, and it requires special machinery and materials for its manufacturing . That is why, I designed a mechanism inspired in compliant mechanisms work principles, adding the ability to customize the length between moving elements to adapt to the user specific anatomic proportions.
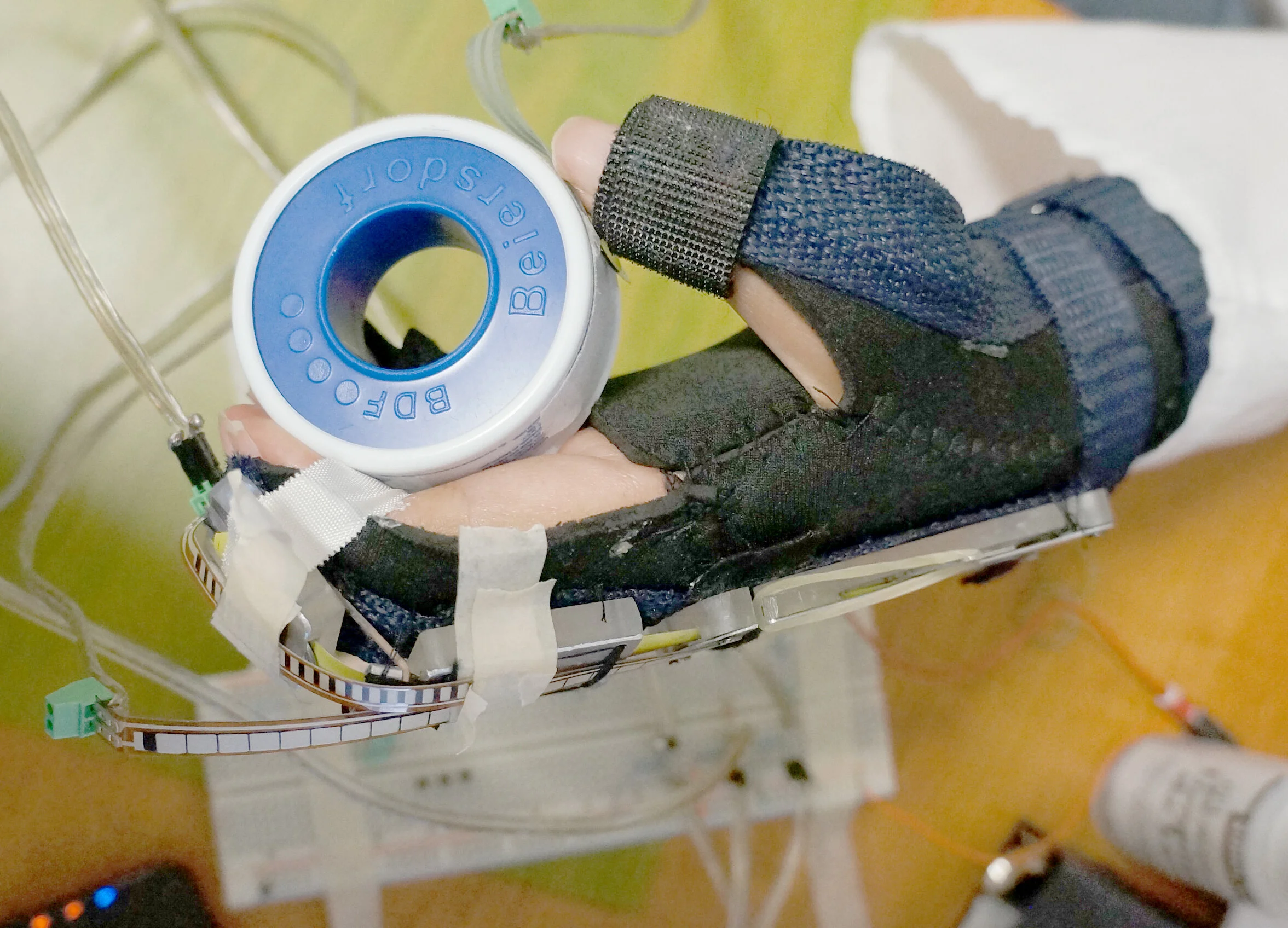
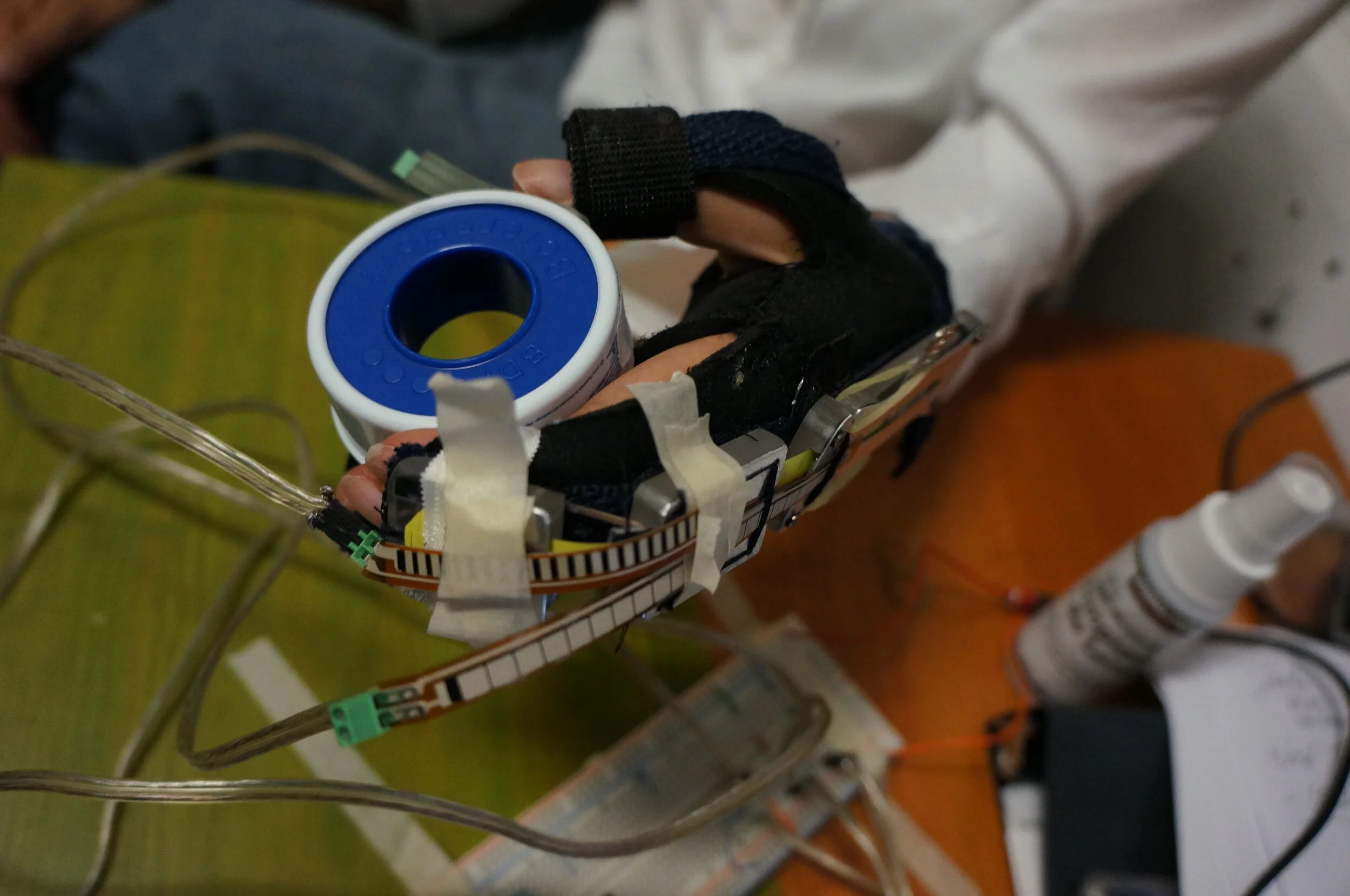
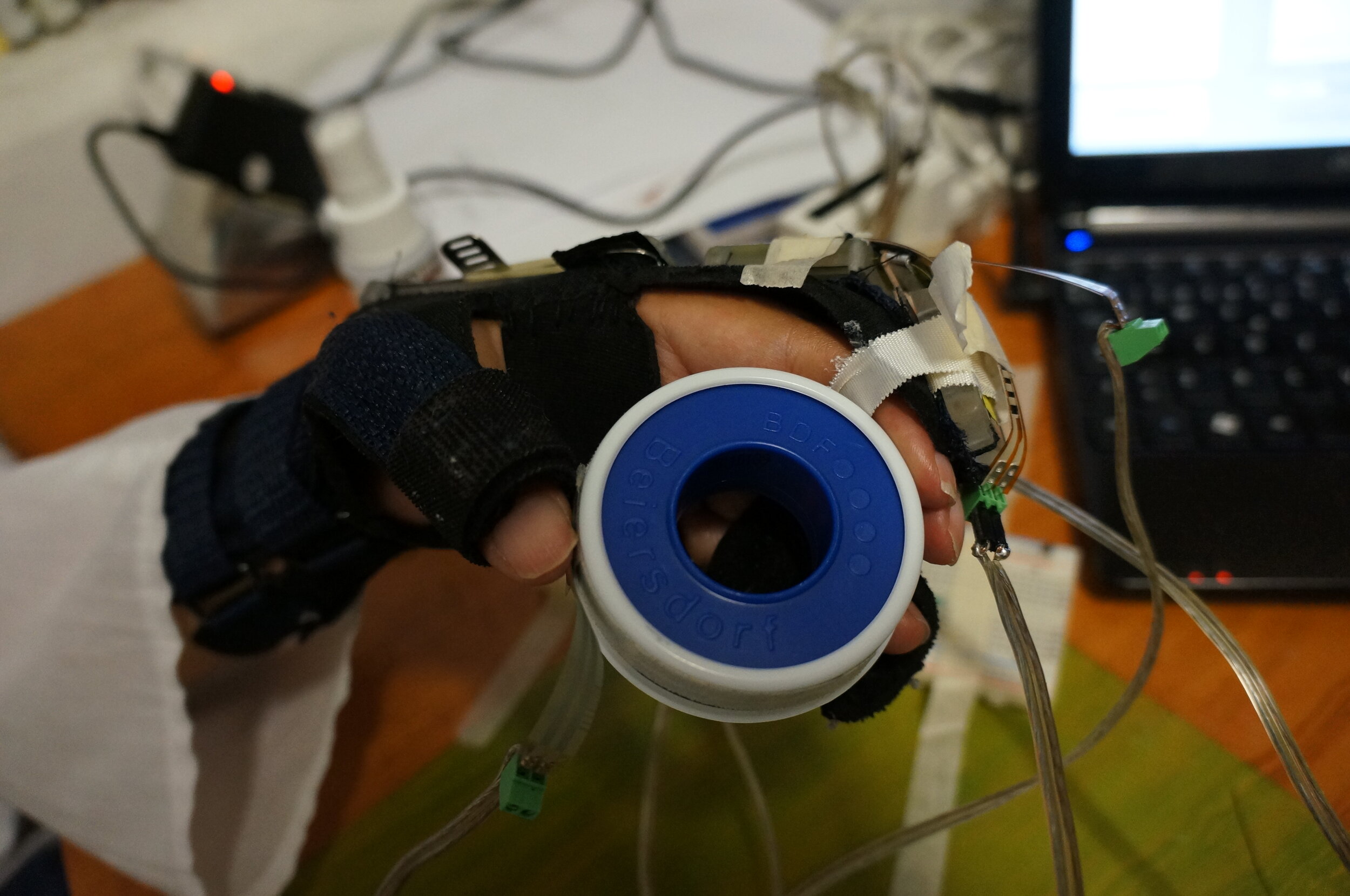
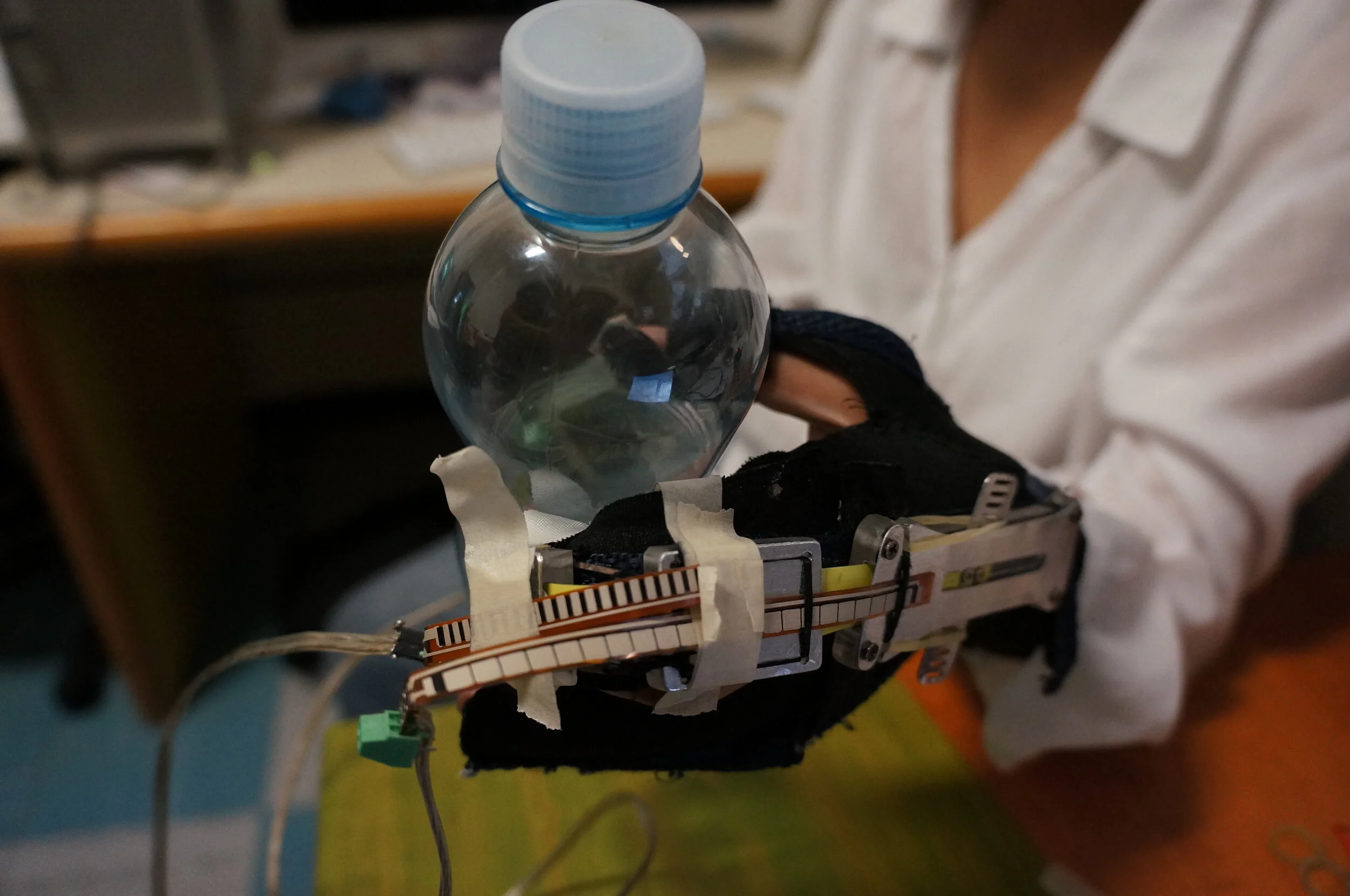
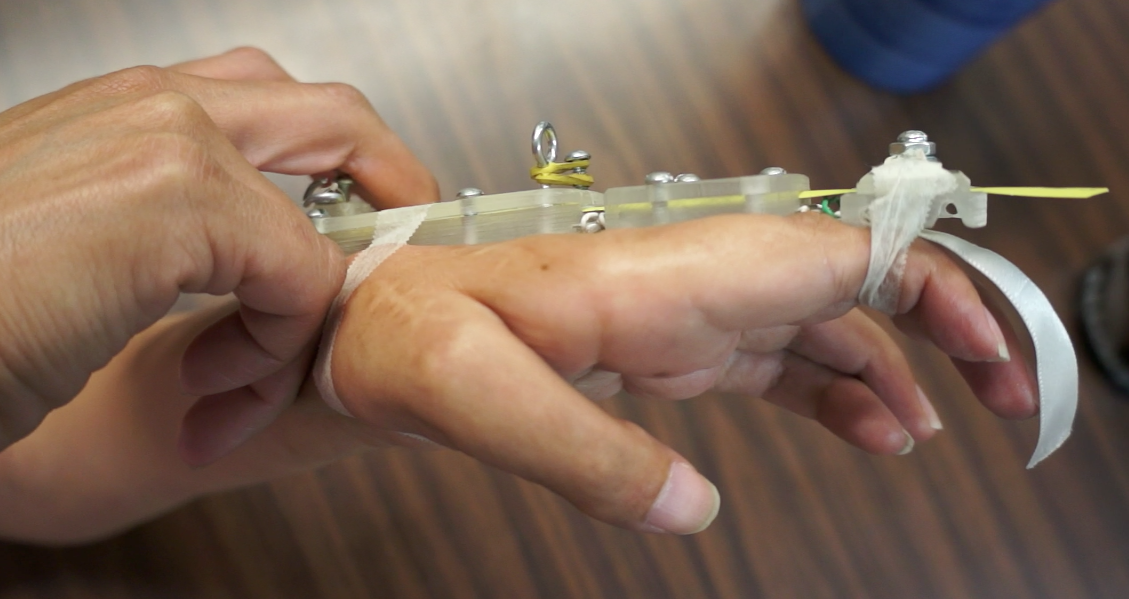
Mechanical independence of the hand orthosis, provide support and force to the patient’s hand with an adaptive grip
It is important that hand orthosis for Brachial plexus paralysis handles all mechanical stress produced by the action of holding things. Because people with this condition have no sensation on their injured hand whatsoever, they are not able to determine if they are being hurt. That means that the mechanism should ensure a correct orthopedic posture for the hand while the mechanism opens or closes as well as the weight of the object being held.
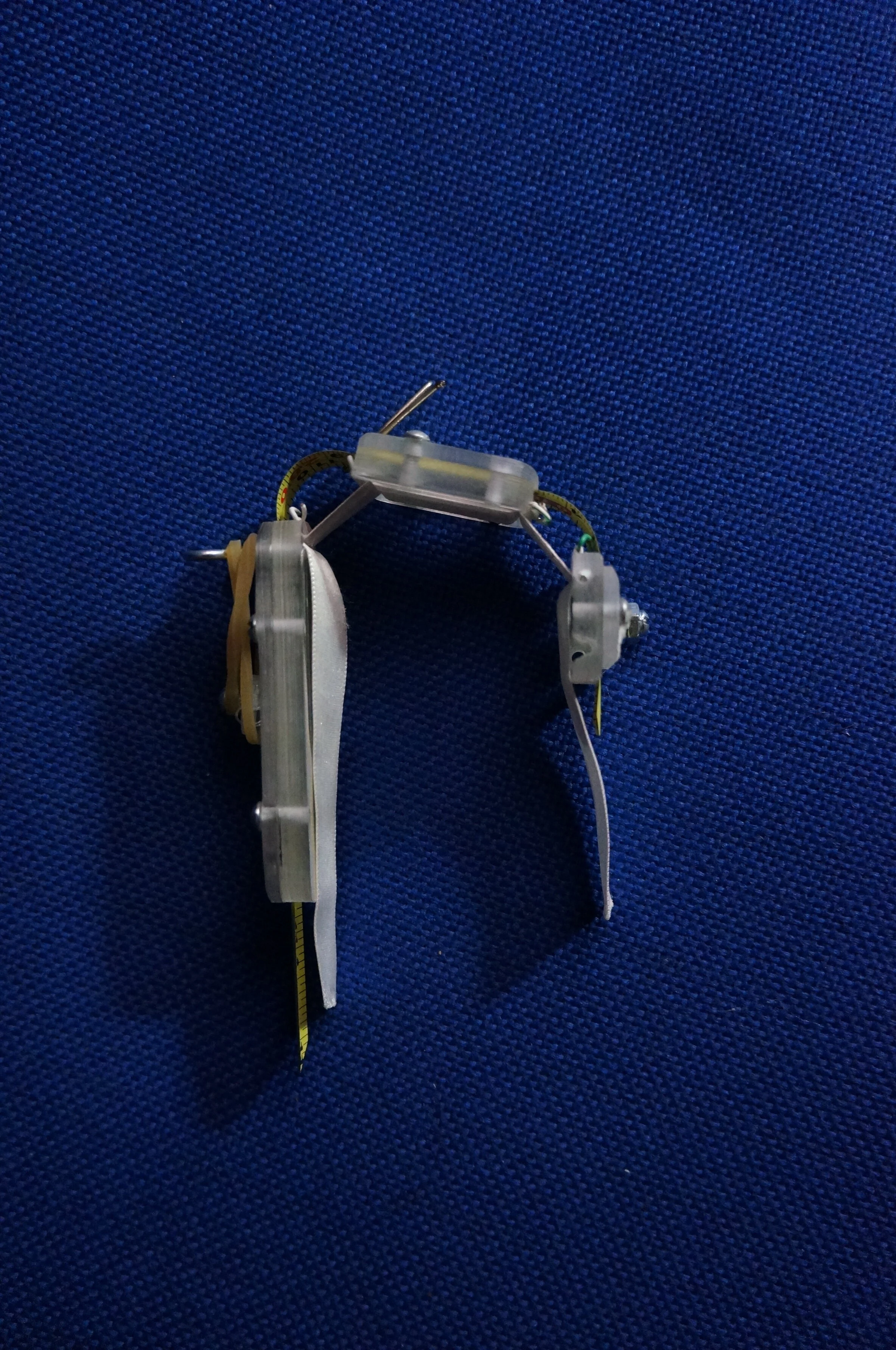
Final Prototype of Hand Orthetics