Human-Robot Interaction
This project was selected to participate in Doctoral Consortium at CHI’21.
“Correlation of Qualitative User Experience Feedback and Interface-Generated Quantitative Data during Human-Robot Interaction”
Data-centric furniture and appliances. Make your living and work space a robotized environment.
Integrates your personal preferences, comfort and security.
Robotic Desk-lamp key specs.
Modular Design.
Stand-alone design (no internet, external devices or human assistants required).
Real-time sensing (20 sps.)
Low-latency (50 ms.)
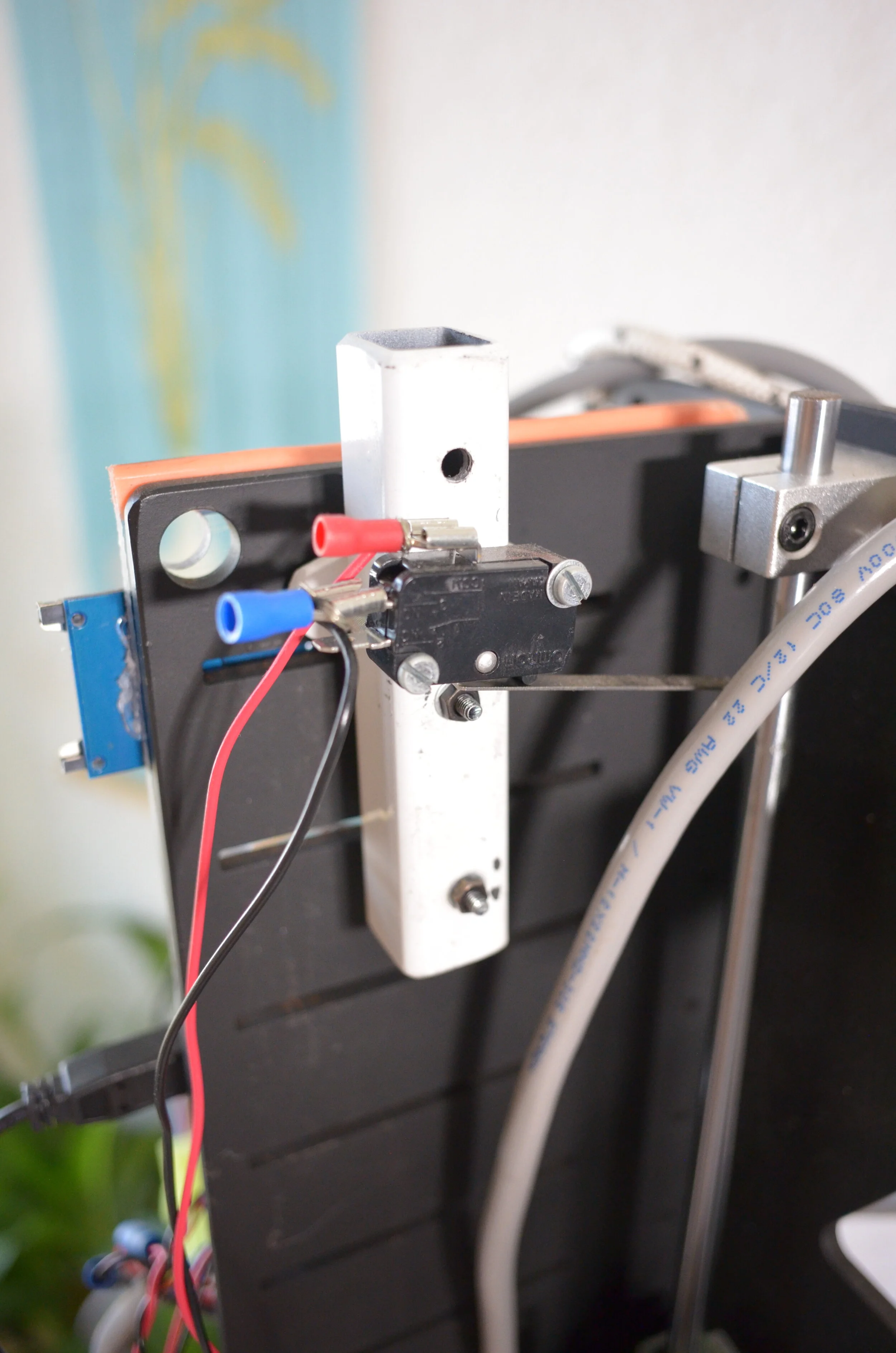
High precision and repeatability control resolution:
Height. Resolution: 3 µm, Range: 50 cm. (0.1% error).
Luminous Flux. Resolution: 20 luxes, Range: 1600 luxes. (1% error).
Sensitivity. Resolution: 0.03 Newtons, Range: 12 Newtons (0.1% error).
Multi-variable data generator (19 variables at 20 sps):
Environmental (date & hour, room temperature, humidity and luminous flux).
User (4 buttons on the interface).
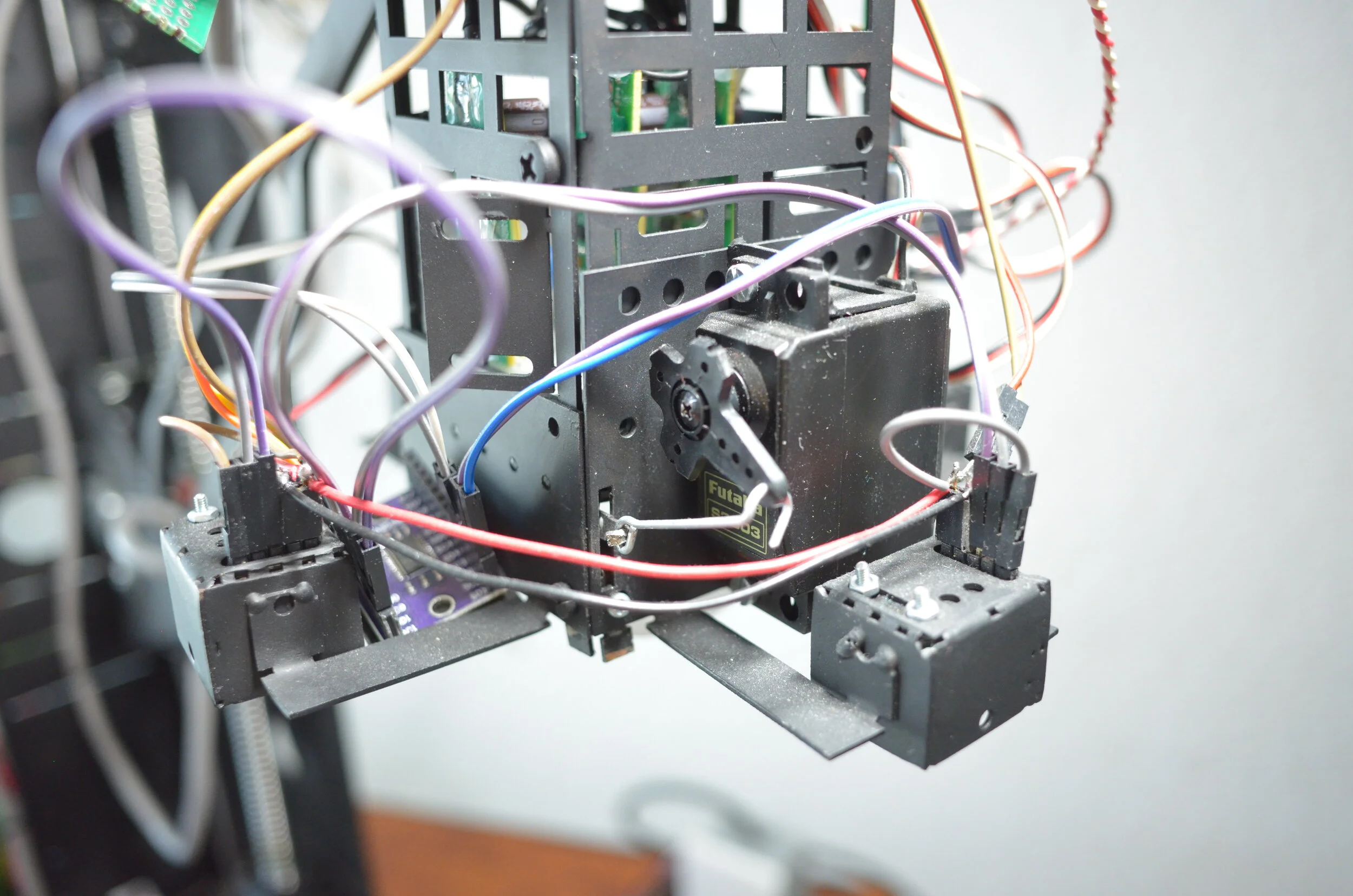
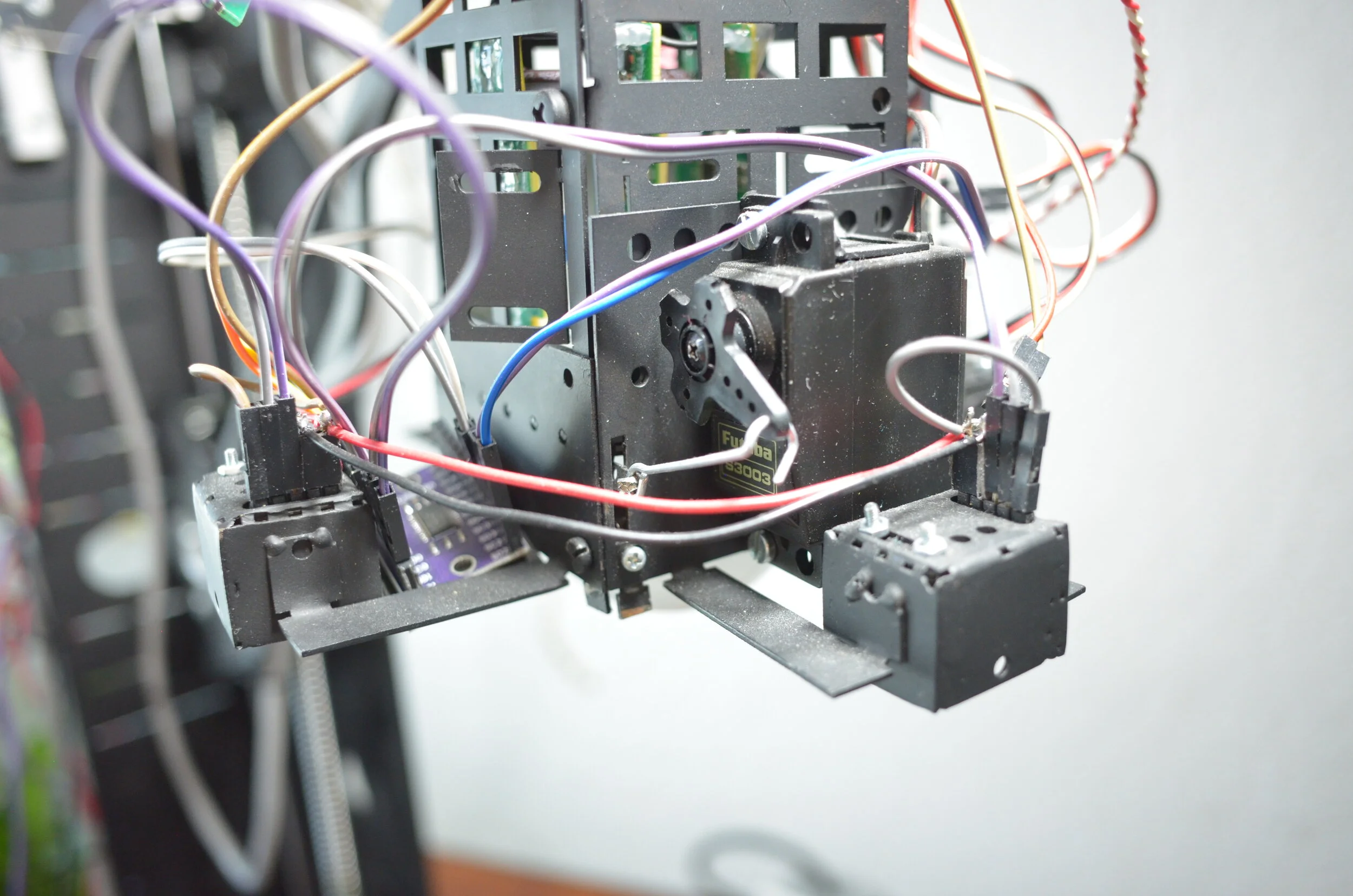
Robot (1 servo stepper motor, 4 lamps, 2 servo motors & 2 internal logic)
Parallel processing (2 Arduino Mega, 2 Arduino Uno)
Communication protocols (i2c & SPI).
Closed-loop control in all variables.
Data stored in the robot (SD module).
Controlled environment (no other light sources besides 2 controlled light sources installed in the room ceiling).

Robot Desk-Lamp. (Back)
Robot Desk-Lamp: Real-time sensing & parallel processing. (Side)

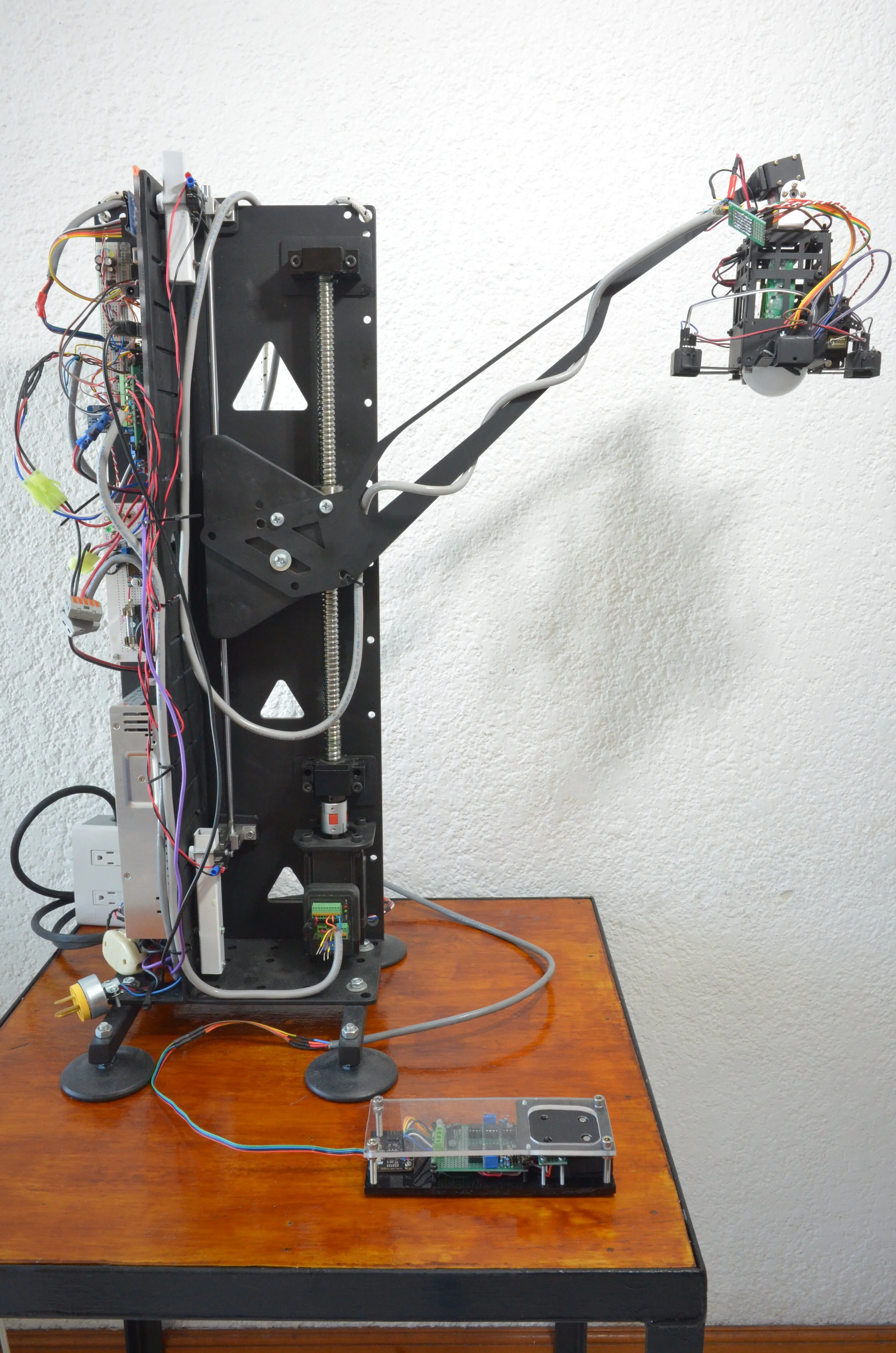
Robot Desk-lamp. (Front)

Force-sensing interfaces
Real-time sensing interface:
4 variables at 20 sps.
Resolution 0.26 gr./digital count.
4 buttons:
2 Honeywell Force Sensors (FSS015WNGB) [Up & Down]
2 On/off switches [On/Off & Shift]
2 Instrumental Amplifiers:
Signal conditioning & process.
Low-noise < 0.1%
Low-distortion < 0.1%
Low-drift < 0.1%
Gaing = 66.
1 ADC module (4 channels)
16 bit sampling.
i2c communication protocol.

Interface Module. Dimensions: 18 x 6.5 x 3.5 cm.
To manufacture the robot, I modeled the frame pieces on Fusion 360, cut the pieces from metal plate and sheet in a CNC laser cutter and TIG welded it (minimum heat deformation).

The lamp-head controls luminous flux using: 3 LED modules (coarse control), a blinds mechanism (fine control) and 4 light sensors (closed-loop control).